

基于MSP430的防尾随门禁系统设计
文章出处:http://www.nexussmartsolutions.com 作者: 人气: 发表时间:2013年02月09日
摘要:针对某些安全等级较高的场所的门禁系统需要防止刷卡一次多人尾随进入、一卡多刷以及对进入场所的人员数据进行远程网络化管理的情况,介绍了1种基于MSP430的防尾随门禁系统,提出了运用接近传感器与称重传感器相配合,并结合门禁卡的数据信息进行防尾随控制,通过称重传感器检测的体重数据与数据库中的重量数据相比对,确定现场采集的数据是否在正常范围内,控制通道开关装置的开闭,利用网络进行数据的远程传输和各门禁系统之间数据的交互更新,从而提高了门禁系统的安全性。
0 引 言
随着经济社会的发展,人们越来越注重安全防范,门禁系统是目前被广泛使用的安全设施之一。但传统的门禁系统已经不能满足现在社会的发展和安全防范的需要。近几年非接触式射频门禁卡系统被广泛应用于各个领域,取得了很好的防范效果。
但是仅采用门禁卡进行信息的识别和确认存在一定的问题。如果在1个人刷卡正常进出门的时候,其他人趁门开启的间隙尾随进出,大多数的门禁卡控制系统无法对这种尾随动作做出正确判断[1]。因此,出于安全防范的整体性考虑,如何保证每次刷卡都只有持卡人本人通过,这就涉及到了防尾随问题。在有的对安全要求较高的大型场所,往往其出入口也不止1个,这时候单个门禁的数据就要及时的同其余门禁的数据进行实时更新,以满足于人员从1个门进,从另1个门出的这种情况,这就需要各个门禁间的数据进行交互更新。本文给出了1种基于MSP430的防尾随门禁系统的设计,运用位置传感器与称重传感器相结合,并配合门禁卡的数据信息进行防尾随控制,同时将各个通道门禁系统通过网口连接进行数据交互更新,很好的解决了这些问题。
1 防尾随门禁系统电路设计
1.1 防尾随门禁系统电路原理
防尾随门禁系统的电路原理如图1所示。数据处理电路接收读卡器的输入信号,控制电磁铁实现装置的开闭,在人员通过通道的过程中采集称重数据,与数据库内对应识别信息相比对。如果现场采集的数据在正常范围内,则机构正常动作,原数据库重量数据与采集的数据取均值后更新数据库;如果现场采集的重量数据不在正常范围内,则锁闭装置,发出报警信号,原数据库内数据不更新。
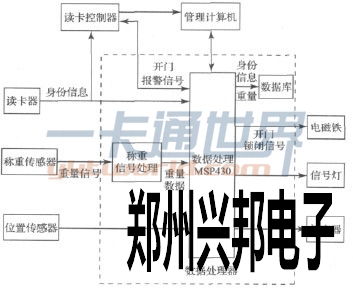
图1 防尾随门禁系统原理
1.2 控制单元的硬件设计
该系统的总体设计思路为:采用上/下位机结构,上位机选用普通的PC作为服务器,下位机采用低功耗、高性能的单片机设计,作为门禁系统的客户端,主要包括电源模块、数据处理和控制模块、重量信号采集模块和网络模块等几个部分。
1.2.1 数据处理和控制模块:数据处理和控制芯片采用美国德州仪器(TI)公司的低功耗、高性能16位单片机MSP430F149[2]。该芯片具有运行速度快、处理能力强、超低功耗等优点,其工作电压为1.8~3.6V;采用了精简指令集,大量的寄存器以及片内数据存储器都可参加多种运算;MSP430F149中断源较多并且可以任意嵌套,从省电状态唤醒系统只需要6μs;它还具有丰富的片上外围模块,其12位A/D转换器带有内部参考源、保持采样、自动扫描等特性;16位定时器具有4种工作模式,可同时进行多个捕获/比较功能;有48个可独立编程的I/O口;2个串行通信接口USART0与USART1;具有60多KB的Flash存储器,可擦写10万次;具有JTAG调试口,可以在线对单片机进行下载和调试[3-5]。
1.2.2 重量信号采集模块:重量信号采集部分电路要实现对应变片传感器信号滤波放大并且进行A/D采样的功能,人员踏上称重平台开始采样,转栅原始位置传感器信号断时结束采样,人员重量计算采用去掉极大值和极小值后取平均值的方法,称重精度误差在5%以内。本文采用差分信号的专用集成芯片AD7705来进行重量信号的处理,重量采集模块原理如图2所示。
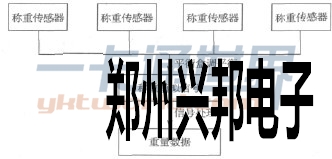
图2 重量采集模块原理
AD7705是集可控滤波器、差分放大和16位高速A/D转换于一体的专用差分信号处理及采集芯片,它具有分辨率高、增益可编程、动态范围广、自校准、功耗低等特点[6]。ADD7705采用Σ-Δ转换技术,有2个模拟通道,片内带可编程数字滤波器,抗干扰性强,分辨率高,稳定性好。它同微控制器的接口也是通用的SPI、micro wire串口协议,接口方便[7-8]。
1.2.3 网络模块:各门禁系统之间要进行信息的交互更新,就需要通过网络部分相连。本文设计的防尾随系统要实现的网络功能就是将人员进出的实时数据上传到上位机并且由上位机来组织数据对各个通道数据库进行及时更新。该部分电路属于高速数字模块,需要采取相应的抗干扰措施防止其对模拟部分等电路造成干扰并且TCP/IP协议本身是比较复杂的[9]。
本文采用1款多功能的单片网络接口芯片W5100来实现,其内部集成有10/100以太网控制器,并且集成了全硬件的TCP/IP协议栈、以太网介质传输层(MAC)和物理层(PHY)[10]。硬件TCP/IP协议栈支持TCP、UDP、IPv4、ICMP、ARP、IGMP和PPPoE,这些协议都在很多领域经过了多年的应用。W5100内部还集成有16KB存储器用于数据传输,它提供了3种接口:直接并行总线、间接并行总线和SPI总线,使得W5100与MCU 接口非常简单,就像访问外部存储器一样[11-12]。使用W5100不需要考虑以太网的控制,只需要进行简单的端口(Socket)编程,从而降低了网络部分设计的难度。
1.2.4 各信号间的隔离:该系统中需要接入多种传感器信号(韦根信号、接近传感器信号、称重传感器信号)以及要输出控制继电器等。这些输入信号和控制信号的供电范围各不相同且继电器之类的期间电磁干扰也比较厉害,对重量传感器信号的采集极为不利。因此在设计这些接口部分时一定要做好隔离措施,本文采用TLP521光电耦合器件来实现各种信号的隔离输入和输出[13]。TLP521是可控制的光电耦合器件,主要优点是单向传输信号,输入端与输出端完全实现了电气隔离,抗干扰能力强,使用寿命长,传输效率高。它广泛应用于电平转换、信号隔离、级间隔离、开关电路、远距离信号传输、脉冲放大、固态继电器(SSR)、仪器仪表、通信设备及微机接口中,可以增加系统的安全性,减小电路干扰,优化电路设计。
2 防尾随门禁系统工作原理
防尾随门禁系统的1个通道包括进门和出门2个方向,各有1个读卡器和电磁铁控制,各有1个信号灯指示状态,出门方向设置了1个按钮,作为手动开门的备用控制。平时信号红灯亮,电磁铁吸合时,对应的信号绿灯亮,信号红灯灭。通道底部放置1个进出门共用的称重装置。顶部有3个位置检测开关,转栅顺时针旋转时,1号接近开关信号为出门电磁铁断电控制信号;转栅逆时针旋转时,3号接近开关信号为进门电磁铁断电控制信号。2号接近开关为原点位置检测,没有信号时,转栅没有回位,电磁铁不能动作。位置检测开关原理如图3所示。
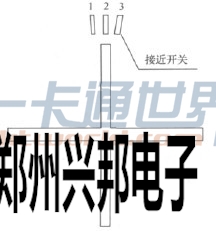
图3 位置检测开关原理
人员刷卡后,读卡器的韦根26信号输入进控制电路后需经电路处理分成2路,1路供数据处理电路使用,1路发送给读卡控制器使用。读卡控制器识别卡的信息后,发出1个进门信号给数据处理电路,此信号为继电器干接点信号。数据处理电路接到进门信号后,检测转栅是否在原点,如果转栅在原点,控制对应的电磁铁吸合,以及对应的信号绿灯亮,并发出提示音“请进”;如果转栅不在原点,数据处理电路不接受进门信号,回到等待状态。数据处理电路将接收的卡信息在数据库内查询,比较是否是参观人员,如果识别卡是参观卡,不做任何处理。如果识别卡是普通卡,数据处理电路计算人员重量是否超过阈值;如果超过阈值,则释放电磁铁,对应的信号红灯亮,发出提示音“识别失败”,并发出1个继电器信号作为报警信号,数据库内数据不更新;如果不超过阈值,则保持电磁铁吸合,将采集的重量数据与原数据取平均值后更新数据库,人员通过。这种方法可有效的检测到持卡人体重信息,防止有人尾随进入。
3 软件设计
图4为软件设计主流程图,系统上电复位初始化,读卡器等待刷卡,刷卡后,读卡器读取韦根信号识别卡的信息,识别通过后发出1个开门信号给数据处理电路,控制继电器开门。同时数据处理电路将接收到的韦根信号信息在数据库中进行查询比对,是参观人员的话直接通过闸机,关门,不是参观人员则调用称重防尾随子程序,获取称重传感器的重量数据与数据库中存储的持卡人体重进行比对,符合设定范围的通过闸机,关门,并在数据库中更新体重信息,超出设定范围的报警,关门,等待下一次刷卡。
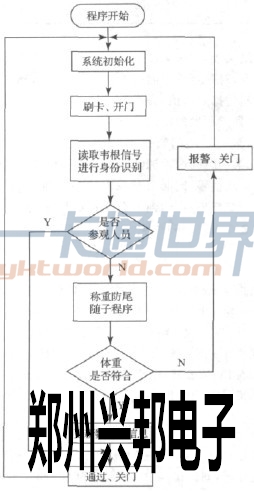
图4 软件流程
对于上位机的编程运用VC++实现,具体的程序设计本文不再详细介绍。
4 结论
本文设计的基于MSP430防尾随门禁系统应用于某电厂各高危区域的进出通道控制,并进行了调试测试。
作者简介:王煜,1988年出生,东华大学硕士研究生,主要从事嵌入式应用系统设计方面的研究,机械零件图像处理与识别等。E-mail:wylzhf@163.com
【稿件声明】:如需转载,必须注明来源和作者,保留文中图片和内容的完整性,违者将依法追究。








